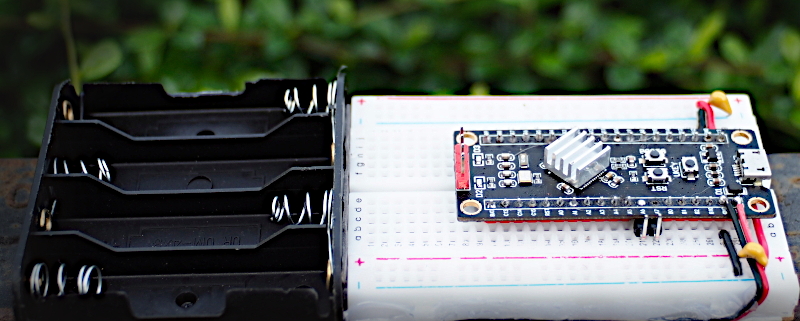
This article discusses the use of USB HID capabilities of STM32F411CEU6 via MicroPython in pyb class, our team was inspired by Dr. Rawat’s article MicroPython for STM32F411 Black Pill: Embedded Programming Style of Siriphokaphirom. So let’s start compiling and uploading the firmware (Read details from Ajarn Dr. Rawat’s article). We use the WeAct STM32F411CEU6 imitation board as shown in Figure 1. When installing MicroPython, there will be a pyb class to use.