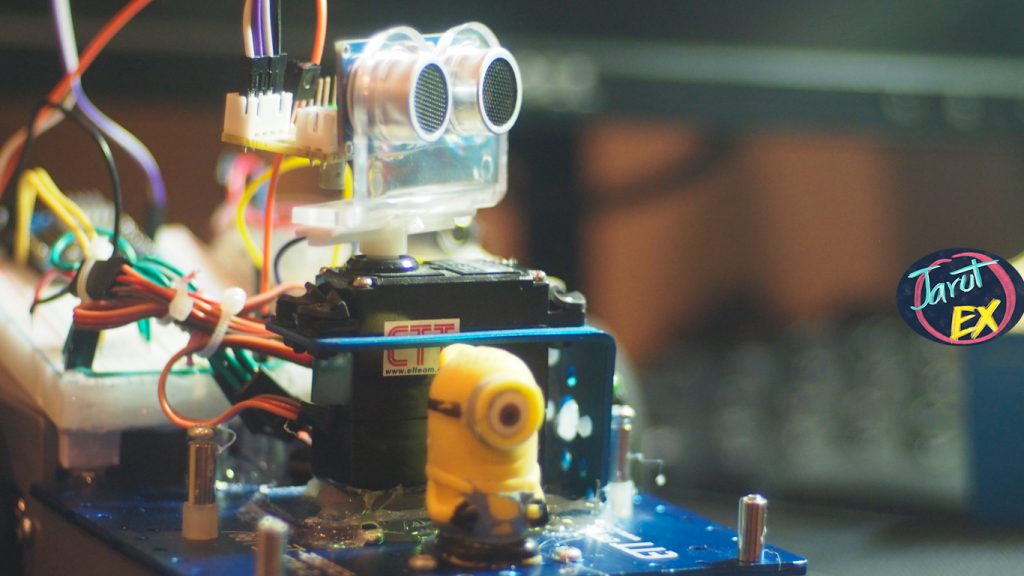
บทความนี้เป็นตัวอย่างการนำหุ่นยนต์รถที่ขับเคลื่อนด้วยมอเตอร์แบบเซอร์โวดังที่กล่าวไปในบทความก่อนหน้านี้มาใช้งาน โดยในบทความนี้ใช้การเคลื่อนที่ด้วยการกำหนดกฎการเคลื่อนที่ภายใต้การตัดสินใจเรื่องระยะทางที่อ่านได้จากเซ็นเซอร์วัดระยะทางอย่าง Ultrasonic Sensor
อุปกรณ์
อุปกรณ์ในการทดลองครั้งนี้ประกอบด้วย
- ESP8266
- R-Base ของบ.อีทีที ซึ่งเป็นชุดโครงตัวรถ ทำด้วย ALUMINUM หนา 3 มม.
- เซอร์โวจำนวน 2 ตัว แบบที่สามารถหมุนได้ 360 องศา
- ล้อติดกับเซอร์โว หรือใช้ชุดตีนตะขาบ (R-TANK V1 KIT)
- ล้อพยุง
- แหล่งจ่ายไฟ (ผู้เขียนใช้ Power Bank)
- เซ็นเซอร์อัลตราโซนิก (HC-SR04 SENSOR)
- เซอร์โว 1 ตัว
เซ็นเซอร์ระยะทาง
การใช้เซ็นเซอร์วัดระยะทางประเภท Ultrasonic หรือ HC-SR04 SENSOR มีหลักการทำงานคือ ส่งพัลซ์ไปทางขา Trig หลังจากนั้นรอรับการสะท้อนกลับมายังขา Echo หลังจากนั้นคำนวณระยะทางจากเวลาตั้งแต่เริ่มสะท้อนจนได้รับเสียงสะท้อนดังฟังก์ชัน distance
def distance():
echoPin.value()
trigPin.on()
trigPin.off()
usec = mc.time_pulse_us( echoPin, 1 )
echoTime = usec/1000000
distanceCm = (echoTime/2)*34300
return distanceCm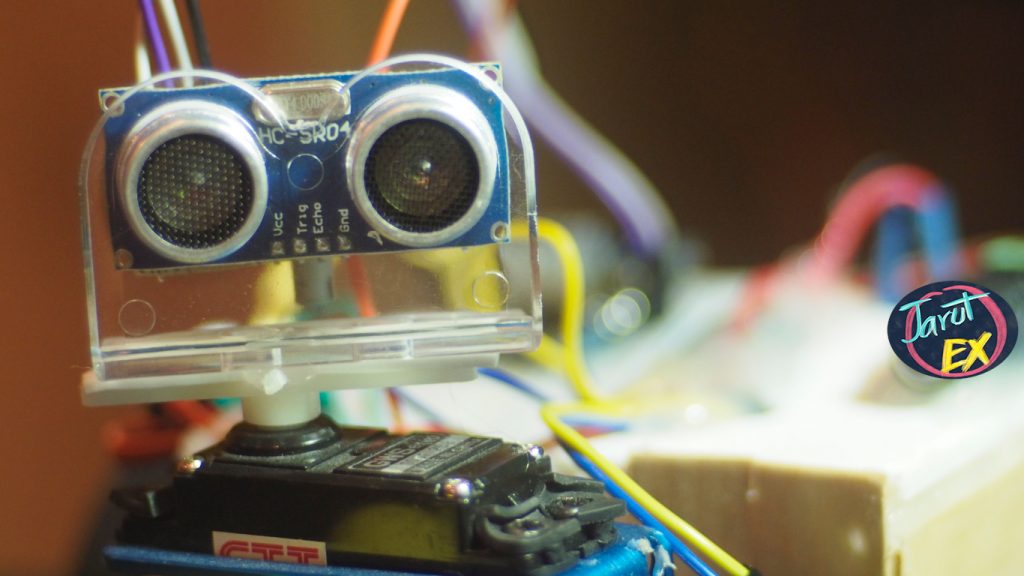
การเชื่อมต่อ
การเชื่อมต่อระหว่าง ESP8266 กับโมดูลต่าง ๆ เป็นดังนี้
| ESP8266 | โมดูล | ขาของโมดูล |
|---|---|---|
| GND | Servo Left | GND |
| 5V | Servo Left | Vcc |
| GPIO5 | Servo Left | Signal |
| GND | Servo Right | GND |
| 5V | Servo Right | Vcc |
| GPIO4 | Servo Right | Signal |
| GND | Servo Ultrasonic | GND |
| 5V | Servo Ultrasonic | Vcc |
| GPIO2 | Servo Ultrasonic | Signal |
| GND | Ultrasonic Sensor | GND |
| GPIO12 | Ultrasonic Sensor | Echo |
| GPIO14 | Ultrasonic Sensor | Trig |
| 5V | Ultrasonic Sensor | Vcc |
ตัวอย่างโปรแกรม
ตัวอย่างโปรแกรม code12-1 เป็นการอ่านค่าระยะทางจากเซ็นเซอร์ ถ้าเซ็นเซอร์พบว่าระยะทางทางซ้าย ขวา หรือกลางน้อยกว่า 13 ซม. จะทำการถอยหลัง แต่ถ้าระยะทางทางซ้ายมีค่ามากที่สุดจะเลี้ยวซ้าย แล้วเดินหน้า ถ้าระยะทางทางขวามากที่สุดจะเลี้ยวขวาและเดินหน้า
# code12-1
import esp
import time
import gc
import machine as mc
gc.enable()
gc.collect()
mc.freq(160000000)
servoL = mc.PWM(mc.Pin(5,mc.Pin.OUT),freq=50) # D1 คุมมอเตอร์ซ้าย
servoR = mc.PWM(mc.Pin(4,mc.Pin.OUT),freq=50) # D2 คุมมอเตอร์ขวา
servoU = mc.PWM(mc.Pin(2,mc.Pin.OUT),freq=50) # D4 คุม Ultrasonic
trigPin = mc.Pin(14,mc.Pin.OUT) # D5
echoPin = mc.Pin(12,mc.Pin.IN) # D6
trigPin.value(0)
waitTime = 350
time.sleep_ms(3000) # wait
def distance():
echoPin.value()
trigPin.on()
trigPin.off()
usec = mc.time_pulse_us( echoPin, 1 )
echoTime = usec/1000000
distanceCm = (echoTime/2)*34300
return distanceCm
def sensorMoveCenter():
global servoU
servoU.duty(70)
time.sleep_ms(waitTime)
def sensorMoveLeft():
global servoU
servoU.duty(90)
time.sleep_ms(waitTime)
def sensorMoveRight():
global servoU
servoU.duty(50)
time.sleep_ms(waitTime)
def robotForward():
global servoL,servoR
servoL.duty(120)
servoR.duty(40)
def robotStop():
global servoL,servoR
servoL.duty(0)
servoR.duty(0)
def robotBackward():
global servoL,servoR
servoL.duty(40)
servoR.duty(120)
def robotTurnRight():
global servoL,servoR
servoL.duty(120)
servoR.duty(120)
def robotTurnLeft():
global servoL,servoR
servoL.duty(40)
servoR.duty(40)
while True:
robotStop()
time.sleep_ms(100)
sensorMoveLeft()
distLeft = distance()
sensorMoveRight()
time.sleep_ms(waitTime)
distRight = distance()
sensorMoveCenter()
distCenter = distance()
print("distance at left/right/center = {}/{}/{} cm.".format(distLeft,distRight,distCenter))
if (distCenter < 13.0) or (distLeft < 13.0) or (distRight < 13.0):
robotBackward()
print("backward")
time.sleep_ms(2*waitTime)
else:
if (distLeft > distRight) and (distLeft > distCenter):
print("Left")
robotTurnLeft()
time.sleep_ms(waitTime)
robotStop()
if (distRight > distLeft) and (distRight > distCenter):
print("right")
robotTurnRight()
time.sleep_ms(waitTime)
robotStop()
robotForward()
print("Forward")
time.sleep_ms(waitTime)
สรุป
จากบทความนี้ผู้อ่านสามารถเขียนโปรแกรมภาษาไพธอนเพื่อทำการอ่านค่าและคำนวณระยะทางจากเซ็นเซอร HC-SR04 ซึ่งใช้หลักการหาระยะทางจากการสะท้อนของคลื่นเสียง และนำความรู้มาประยุกต์กับการขับเคลื่อนหุ่นยนต์เคลื่อนที่ด้วยล้อ เพื่อให้หุ่นยนต์มีการตัดสินใจในการทำงาน และทำงานตามเงื่อนไขที่กำหนดไว้ ซึ่งเป็นการใช้ปัญญาประดิษฐ์แบบง่าย ๆ ประเภทการตั้งเงื่อนไขการทำงาน
ทีมงานของเราหวังว่าผู้อ่านจะได้ประโยขน์จากบทความนี้ และสามารถนำไปประยุกต์ใช้งาน หรือสร้างเงื่อนไขการทำงานได้หลากหลาย หรือมีความถูกต้องแม่นยำมากยิ่งขึ้น หรือสร้างปัญญาประดิษฐ์ให้แก่หุ่นยนต์รถให้มีความซับซ่อนมากยิ่งขึ้นไป
สุดท้ายนี้ขอให้สนุกกับการเขียนโปรแกรมครับ
(C) 2020, โดย อ.ดนัย เจษฎาฐิติกุล/อ.จารุต บุศราทิจ
ปรับปรุงเมื่อ 2020-10-23