Posted indisplay English esp8266 MicroPython sensor Uncategorized
[EN] Using the DHT22/DHT11 Temperature and Humidity Sensor Module with ESP8266
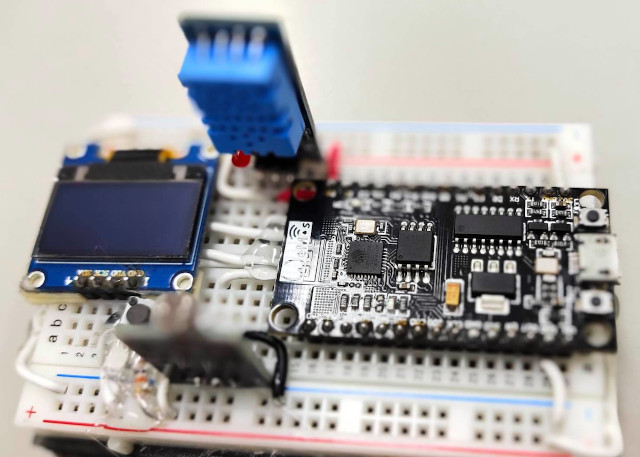
This article uses the DHT22 and DHT11 temperature and humidity measurer modules with Python. They are sensor modules that operate using a single signal cable which will save the microcontroller’s port connection. In addition, MicroPython has a library prepared for DHT22 and DHT11 implementation, making it convenient, time-saving and reduce errors that may be caused by manual programming.
There are 3 examples in this article: code17-1 is a normal reading of values, but code17-2 is a loop to read again. By finding the highest and lowest values and display on the LCD module as shown in Figure 8 and example code17-3 showing the average value of temperature and humidity.