[EN] Binary Search Tree
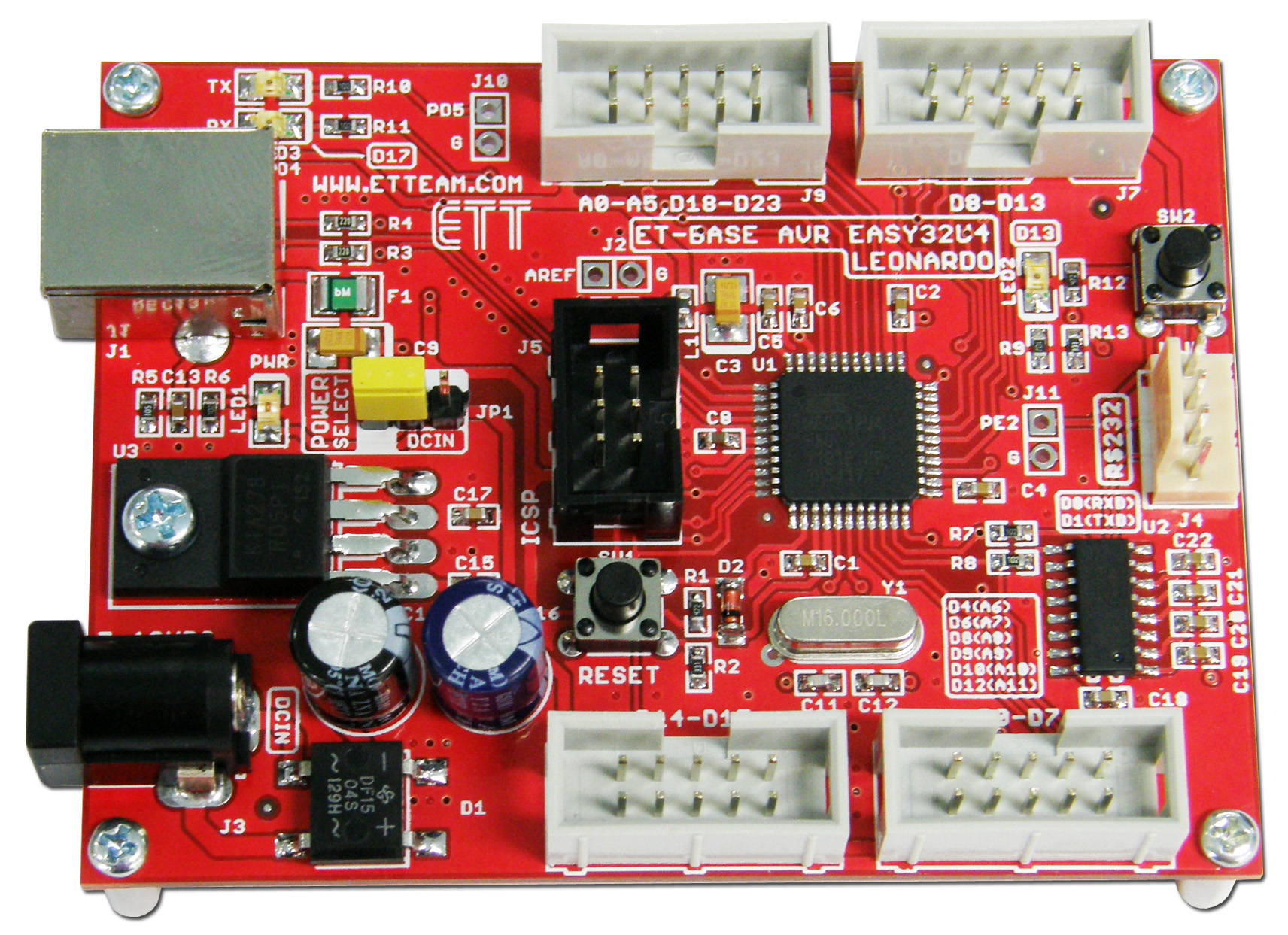
This article is about programming C/C++ language with Arduino Nano, Arduino Uno, LGT8F328P [NANO F328P-C] and ET-BASE AVR EASY32U4 (Figure 1) or other boards and platforms using C language for learning to code another type of data structure management program that has different storage and management methods, called BST or Binary Search Tree, as in Figure 2, which is a structure that can be applied to collecting data with attributes in which the data on the left node is less than current node and the right node is greater than current node or the opposite, the left node is greater and the right noe is less. Thus, searching for data in the event that the tree is balanced both left and right on the BST structure saves time or number of searches per round by half of available data, for example, there are 100 data sets in the first round, if the current node is not what you’re looking for it, the choice left is to find from the left or right node. This selection causes the data of the other side to be ignored or cut it in half approximately but if the Binary Search Tree is unbalanced, the search speed will not be much different from the Sequential Search.