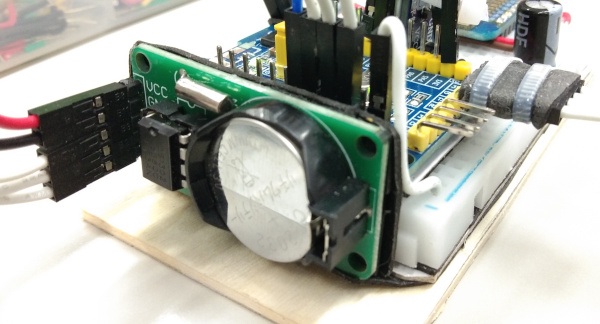
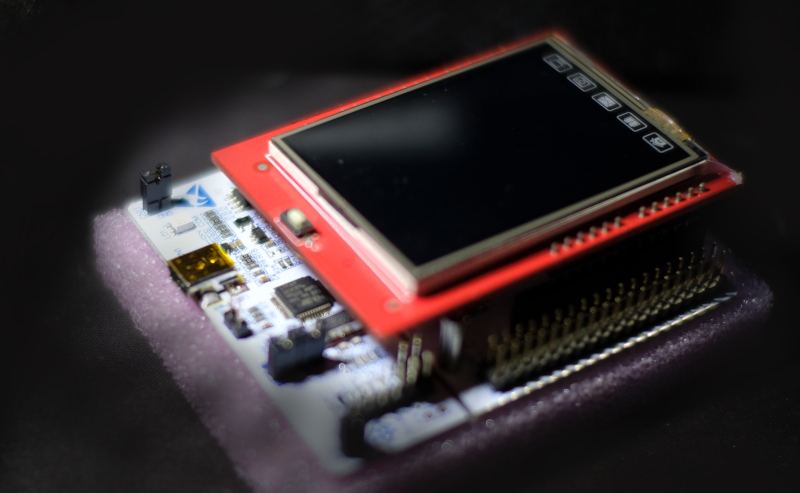
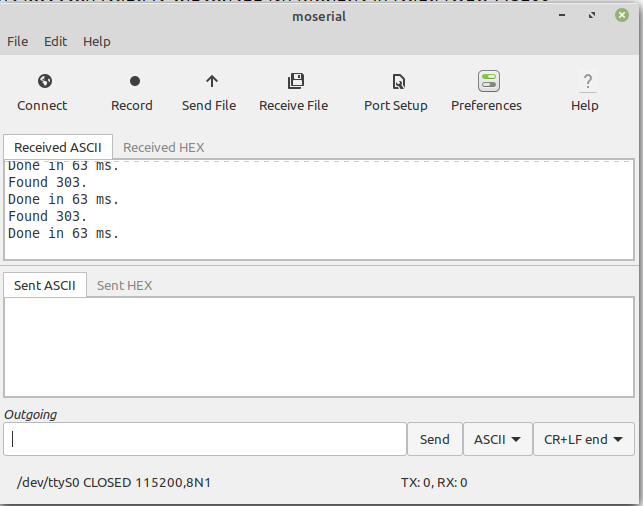
From the article programming Python on Micropython to use RTC number DS1302, this time, we change the programming language to C++ for Arduino by using STM32F030F4P6 Cortex-M0, esp8266 and Arduino Mega as a worker instead of ESP32 as shown in Figures 1, 2 and 6 by show the report on the RS232 port to display the date and time as shown in Figure 4.
(Figure. 1 DS1302 experiment with STM32F30F4_6.)Read More
This article is about using a 32-bit microcontroller board under the Cortex-M0 architecture RISC that is economical but the performance is considerably better than the 8-bit board. However, our team has created an alternative for those who are interested in reading. The article starts with the content about the features of microcontrollers, board installation for Arduino IDE to know and example code to toggle LED, traffic through the USART communication port and Prime numbering test to see the processing speed in an iterative loop.