This article discusses the implementation of a servo motor module using the ESP32’s GPIO that outputs a digital PWM signal or Pulse Width Modulation or an LEDC (LED Control) which enables frequency band generation or adjust the proportion of status 1 and 0 in 1 waveform with a frequency of 50Hz using the experimental board as shown in Figure 1.
Sketch uses 13188 bytes (80%) of program storage space. Maximum is 16384 bytes.
Global variables use 876 bytes (21%) of dynamic memory, leaving 3220 bytes for local variables. Maximum is 4096 bytes.
ภาพที่ 1 บอร์ด STM32F030F4P6 กับโมดูล CH340ERead More
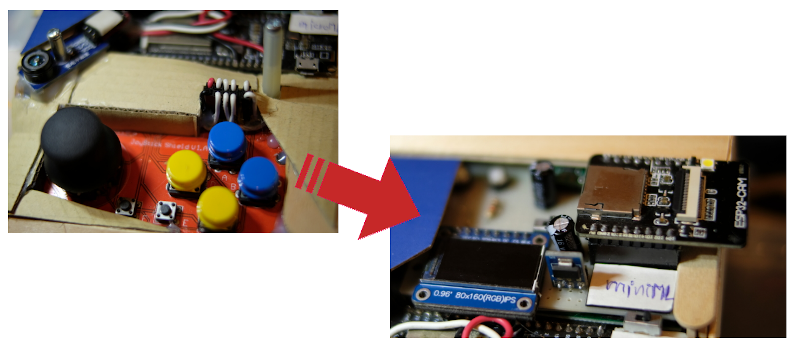
This article is based on the article programming a client/server for a weather station over a wireless network or WiFi to modify from reading data from sensors to joystick shield (Arduino Joystick Shield) so that it has become a wireless game controller using MicroPython and an ESP32 microcontroller as shown in Figure 1. It is possible to control the movement of objects in the display via a ST7735 TFT screen connected to another ESP32. It will be found that the Python implementation of MicroPython is applicable in this example. And with an easy-to-write language and code that can be modified without recompiling and uploading, it’s easy to write prototype code for further development at a higher speed.